被称为马里亚纳海沟1万米深的深渊,是地球最深的部分,有着极端的环境。以前可以到达这里的刚体大多是重达几吨的大型潜水器。
如今,一个身长不到50厘米、重量只有1.5公斤的小型深海变形机器人“精灵”,打破了这一“禁区”,为深海探测带来了新的可能。相关结果发表在《科学-机器人》上。
该机器人是由北航等单位历时六年研发的。受蝙蝠鱼运动模型的启发,该团队设计了一个可以游泳、滑行和爬行的多模式机器人。
它可以利用手性双稳态超材料结构在0.75秒内实现快速游走转换,适应不同的海底地形和任务要求。
深海高压对小型机器人影响巨大,柔性驱动器材料模数的增加会削弱操作性能。
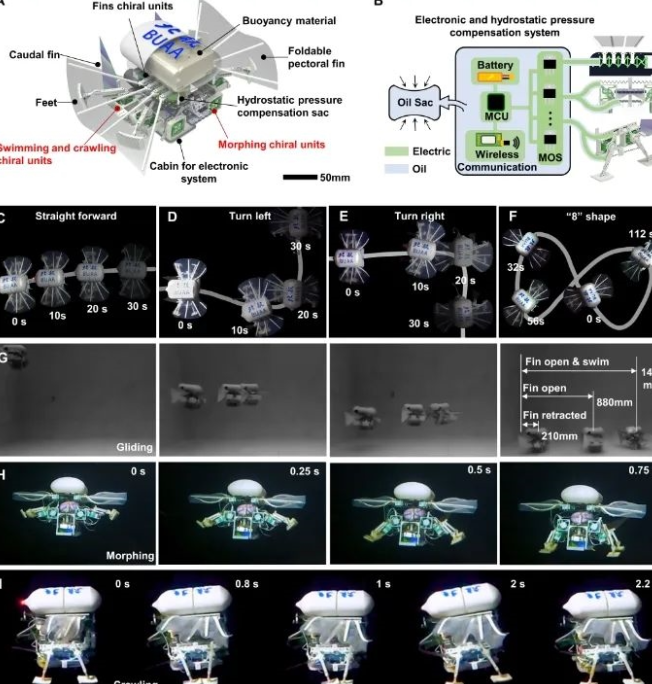
为此,团队设计了一种新的驱动装置,利用双稳态手性超材料结构切换时的突然跳跃来实现高效驱动,将深海高压的负面影响转化为辅助。
针对深海低温环境,团队采用形状记忆合金进行对抗性驱动,并通过周期性电流加热交替收缩驱动手性超材料单元进行切换,实现了驾驶员的快速循环摆动。
未来,该研究团队将提高小型深海机器人的耐力和运动效率,实现更大范围的深海探测和监测,并协助海洋资源开发、考古发掘、环境监测等。
